#婥傑偖傟 仌 婥傑傑 仌 揤幾婼側榁偄傏傟媄弍壆偺擔乆偺婰榐偺偆偪丄傕偺偯偔傝丒岺嶌丒廋棟丒摴嬶側偳偵娭楢偟偨婰帠偱偡丅
塃抂忋抂偺摨堦僇僥僑儕乕僕儍儞僾儃僞儞偱摨偠僇僥僑儕乕偺懠偺婰帠傪弴斣偵偛棗偄偨偩偗傑偡丅
塃抂忋抂偺摨堦僇僥僑儕乕僕儍儞僾儃僞儞偱摨偠僇僥僑儕乕偺懠偺婰帠傪弴斣偵偛棗偄偨偩偗傑偡丅
Access Counter: 


| -2035- Arduino 偲偐: 偦偺俀 |
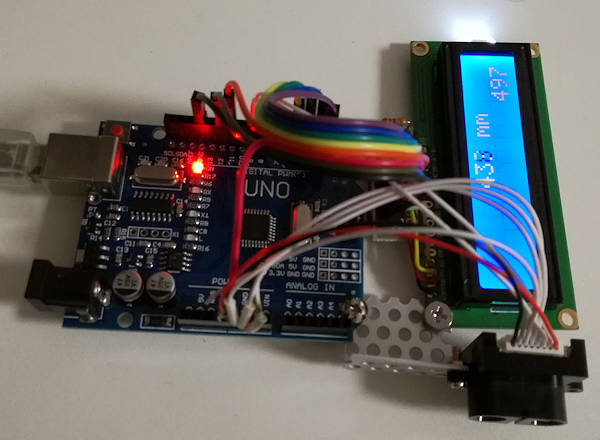 壗擔偐慜偵儚儞僠僢僾MCU偺 Arduino-Uno偲尵偆儃乕僪傪偄偠偭偰偄傞偲彂偄偨丅偙傟偵 TOF(Time of Fly丗斀幩岝偺抶墑帪娫傪應偭偰嫍棧傪媮傔傞尨棟)偲尵偆應嫍儌僕儏乕儖傪宷偄偱丄UART擖椡傪 LCD偵昞帵偝偣傞娙扨側儗乕僓乕應嫍媀傪嶌偭偰傒偨丅巊梡偟偨TOF儌僕儏乕儖偼旐幨懱偵岦偗傞偩偗偱丄10m嬤偔傑偱寢峔惓妋側嫍棧偑昞帵偝傟傞丅(幨恀塃懁庤慜偺崟偭傐偄僾儔僗僠僢僋偺夠偑TOF儌僕儏乕儖晹暘) 壗擔偐慜偵儚儞僠僢僾MCU偺 Arduino-Uno偲尵偆儃乕僪傪偄偠偭偰偄傞偲彂偄偨丅偙傟偵 TOF(Time of Fly丗斀幩岝偺抶墑帪娫傪應偭偰嫍棧傪媮傔傞尨棟)偲尵偆應嫍儌僕儏乕儖傪宷偄偱丄UART擖椡傪 LCD偵昞帵偝偣傞娙扨側儗乕僓乕應嫍媀傪嶌偭偰傒偨丅巊梡偟偨TOF儌僕儏乕儖偼旐幨懱偵岦偗傞偩偗偱丄10m嬤偔傑偱寢峔惓妋側嫍棧偑昞帵偝傟傞丅(幨恀塃懁庤慜偺崟偭傐偄僾儔僗僠僢僋偺夠偑TOF儌僕儏乕儖晹暘)ARM偺応崌偼嶻嬈梡搑偑儊僀儞偱丄僐僗僩嵟揔壔偺偨傔偵儊乕僇乕傗僠僢僾偺庬椶偑懡偔偰丄僐傾偺晹暘偼堦弿偱傕僠僢僾偵崌傢偣偰庒姳庤捈偟偑昁梫偱丄僠儑僢僩偩偗巊偆偵偼懘偺晹暘偑寢峔僱僢僋偵側傞偑丄Arduino偼僉僶儞娷傔偰婯奿偑寛傑偭偰偄傞偺偱儔僀僽儔儕偺岞奐側偳忣曬検偑朙晉偱丄寢峔妝偟偰偙偆偟偨僙僢僩偑嶌傟傞曋棙側乽戝恖偺僆儌僠儍乿偩丅 嶲峫傑偱偵 僗働僢僠偼偙傟丅(價僊僫乕偱娫堘偄偑偁傞偐傕抦傟側偄偺偱恀帡偡傞応崌偼帺屓愑擟偱両) 崱擔偺幨恀偼偙偺曈傝偱偼偡偱偵壴惙傝偺悈愬丅姦偝偑偙傟偐傜堦憌尩偟偔側傞偺偵丄怉暔偼妋幚偵傕偆弔偵岦偐偭偰偄傞丅 |
|
2019/01/17 |