#2043偱丄Arduino偺僔儏儈儗乕僔儑儞偑壜擻側娙扨側儘僕僢僋僔儏儈儗乕僞 Thinkercad偵偮偄偰彂偄偨丅
峫偊偰傒傟偽巹偑 PC忋偱偺傾僫儘僌夞楬僔儏儈儗乕僔儑儞偵偮偄偰帋偟偨偺偼傕偆20擭偔傜偄傕慜偵側傞(偲巚偆)丅偦偺屻偺 PC(CPU偲O/S)偺恑曕偼栚妎傑偟偐偭偨偺偱丄側傜偽傾僫儘僌夞楬僔儏儈儗乕僔儑儞偺悽奅傕丄埲慜偺條憡偲偼堘偭偰偄傞偩傠偆偲巚偭偰専嶕偟偰傒偨丅寢壥丄柤慜偩偗偼暦偄偨偙偲偑偁傞 LTSpice 偲偄偆偐偮偰偺儕僯傾僥僋僲儘僕乕幮(尰傾僫儘僌丒僨僶僀僙僘幮)偺僣乕儖偑嬈奅昗弨揑側抧埵傜偟偄偲傢偐偭偨丅
偙偺僜僼僩僂僃傾傕僼儕乕偱僀儞僗僩乕儖僼傽僀儖偺僟僂儞儘乕僪偵儐乕僓乕搊榐傕昁梫側偄偲偄偆偙偲偱憗懍僟僂儞儘乕僪丒僀儞僗僩乕儖偟偰巊偭偰傒偨丅
愄偺僀儊乕僕偱偼丄晹昳偺僨乕僞擖椡側偳慜抜偺弨旛偑戝曄偱丄偲偰傕庯枴偱巊偆偲偄偆僀儊乕僕偱偼側偐偭偨偲巚偭偨偑丄崱夞帋偟偰傒傞偲(彮側偔偲傕僨傿僗僋儕乕僩晹昳偺夞楬偺摿惈傪尒傞掱搙側傜)僩儔儞僕僗僞側偳昗弨揑側晹昳僨乕僞偼弨旛偝傟偰偄偰丄偦傟傜傪夞楬恾忋偵僪儔僢僌偟偰攝抲偟偨傝寢慄偟偨傝偟偰丄揹尮偺僗僀乕僾摿惈傪寛傔傞偩偗偱 DC摿惈偑摼傜傟偨丅僼傿儖僞乕側偳傕 LC抣傪擖椡偡傟偽尭悐検偑媮傑傞傛偆偩丅
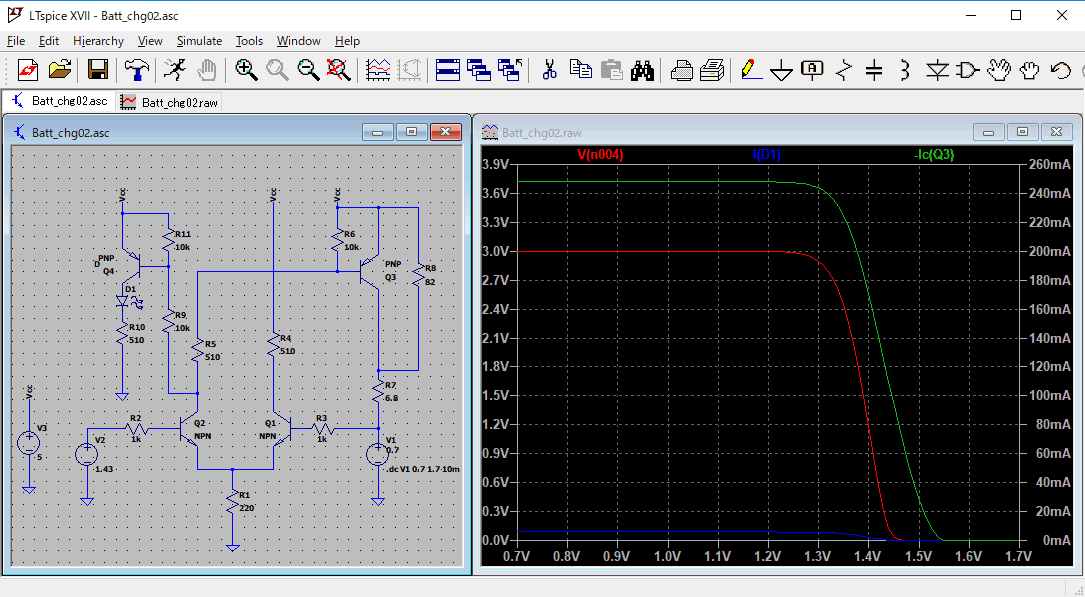
塃恾偼Ni-MH廩揹抮偺廩揹惂屼傪傾僫儘僌夞楬偱傗偭偨傜偳偆側傞偐偲偄偆僔儏儈儗乕僔儑儞丅枮廩揹傑偱0.2C掱搙偺揹棳偱丄偦偺屻 0.1C掱搙偱曗廩揹偡傞巇條傪僔儏儈儗乕僔儑儞偟偨傕偺丅忋偱怗傟偨傛偆偵 Arduino側偳 A/D曄姺傑偱僠僢僾偵搵嵹偟偨懡婡擻 MCU慡惙偺帪戙偵柍堄枴側僔儏儈儗乕僔儑儞偩偲偼暘偐偭偰偄傞偑丄僷僜僐儞夋柺忋偩偗偱娙扨偵僔儏儈儗乕僔儑儞弌棃傞偲傢偐偭偨偺偱姼偊偰僩儔僀偟偰傒偨丅